注记
检测点
单例模式
Terminal
博通蓝牙使能
元开发
游戏策划
PM项目管理
命名实体识别
前沿技术
界面开发
fpga
每日一问
营销电子邮件
SAP PI接口归档
大学生网页作业
GO111MODULE=off
闪存
团队开发
图神经网络
激光雷达
2024/4/11 19:09:34
基于matlab城市空中交通场景中的激光雷达与雷达融合仿真(附源码)
目录
一、创建城市空中交通方案
二、定义无人机传感器套件
三、定义跟踪系统
3.1 激光雷达点云处理
3.2 激光雷达跟踪器
3.3 雷达跟踪器
3.4 轨道融合
四、可视化
五、模拟场景
六、跟踪指标
七、总结
八、程序 此示例演示如何使用多对象跟踪器跟踪城市环境中的各…
激光雷达—读书笔记(1)
激光雷达—读书笔记(1)
为了发论文,没有办法,只好新开了本笔记,用来鞭策自己好好学习,争取每个星期都能发一篇博客。 昨天看了一篇论文,讨论了激光雷达的特性,并且建立了一个分布模…

手把手教学基于简单神经网络的激光雷达点云车辆检测(附代码)
准备工作
pythonmatlabKITTI数据集激光雷达部分参考文献(本文基本按照该文献方式处理):邓淇天. 基于激光雷达和视觉传感器融合的障碍物识别技术研究[D]. 南京: 东南大学, 2019.整个项目已push至github(数据部分上传,模…

北科天绘 16线3维激光雷达开发教程
文章目录前言一、配置IP地址二、ROS Driver1.创建工作空间并初始化2.启动雷达驱动程序三、 RVIZ 显示 R-Fans 点云数据前言
本教程使用的是三维激光雷达为北科天绘的R-Fans-16,采用网口连接传输数据,9-36V供电。 Ubuntu版本为20.04,Ros版本为Neotic。 !…

虹科自动驾驶 | 飞行时间原理 vs FMCW原理
FMCW被认为是LiDAR规则的改变者——但是这项技术真的有潜力改变这个行业吗?FMCW是否已经可以广泛应用于传感器?为什么大多数激光雷达制造商更愿意继续依赖飞行时间原理?
无论是扫描、旋转还是闪光技术,所有的激光雷达传感器都有一…
![#每周一篇论文3#[感知] 激光雷达标定](https://img-blog.csdnimg.cn/20210131205743245.PNG?x-oss-process=image/watermark,type_ZmFuZ3poZW5naGVpdGk,shadow_10,text_aHR0cHM6Ly9ibG9nLmNzZG4ubmV0L2hnel9ncw==,size_16,color_FFFFFF,t_70#pic_center)
#每周一篇论文3#[感知] 激光雷达标定
目录激光雷达外参数自标定选取大致地面数据地平面分割计算变换矩阵系统评价参数输出校准效果资源下载激光雷达外参数自标定
基于激光雷达的车载三维重建系统和感知系统工作时需要对激光雷达的外参数(三个旋转参数和三个平移参数)进行标定。 激光雷达的外参数的标定是指求解激光…
利用ArcGISPro/GeoScenePro从激光雷达数据中提取 3D 建筑物
开始使用激光雷达数据 在本课程中,您将从激光雷达数据中提取信息。 激光雷达(激光探测及测距)是一项遥感技术,它利用激光对地球表面进行密集采样,以产生高精度的 x, y, z 点测量。 这些点的集合称为点云。 要从激光雷达…
重建大师跑图瓦片失败,一般是什么原因?
答:一般是边缘瓦块失败比较多的情况会出现,其他一些正常瓦块失败,重新提交基本上也都可以解决。
重建大师是一款专为超大规模实景三维数据生产而设计的集群并行处理软件,输入倾斜照片,激光点云,POS信息及像…
激光雷达学习笔记(六)ARM-Linux平台算法移植
在写第一篇激光雷达的日志我就说,激光雷达的算法开发的最终的目标是移植到嵌入式设备上, 因为在机器人定位时,不可能用一个很大很重的设备,因此最理想的还是ARM平台,(工控机也可以 考虑,几乎不存…

大疆Livox MID-360安装ROS1/2驱动 Ubuntu20.04
文章目录 一、接线连接二、安装上位机可视化工具三、安装ROS驱动3.1 配置静态IP3.2 安装Livox SDK23.3 安装ROS驱动3.4 驱动 本文介绍如何在Ubuntu20.04中安装大疆Livox MID-360的ROS1/2驱动
一、接线连接
livox航插一分三线,其中航空母头连接激光雷达,…

在无人驾驶中,激光雷达给摄像头填了哪些坑?
导语:本文内容来自速腾聚创 CEO 邱纯鑫在雷锋网硬创公开课的分享,由雷锋网旗下栏目“新智驾”整理。编者按:本文内容来自速腾聚创 CEO 邱纯鑫在雷锋网硬创公开课的分享,由雷锋网(公众号:雷锋网)旗下栏目“新智驾”整理…

ubuntu18.04 RTX3060 rangnet++训练 bonnetal语义分割
代码链接: https://github.com/PRBonn/lidar-bonnetal 安装anaconda环境为 CUDA 11.0(11.1也可以)
anaconda环境如下
numpy1.17.2
torchvision0.2.2
matplotlib2.2.3
tensorflow1.13.1
scipy0.19.1
pytorch1.7.1
vispy0.5.3
opencv_python…
激光雷达学习笔记(三)特征提取
激光雷达获取的信息是和周围物体之间的距离信息,在移动机器人尤其是自主移动机器人领域具有非常广泛的应用,那我们就从移动机器人的自主导航开始聊吧。 移动机器人导航是指移动机器人依靠传感器在特定环境中,按时间最优、路径最短或能耗最低等…
激光雷达学习笔记(四)定位
机器人定位的目的是为了知道“自己在什么地方”,目前,机器人定位的方法可以分为非自主定位与自 主定位两大类。所谓非自主定位是在定位的过程中机器人需要借助机器人本身以外的装置如:全球定位 系统(GPS)、全局视觉系统等进行定位;…
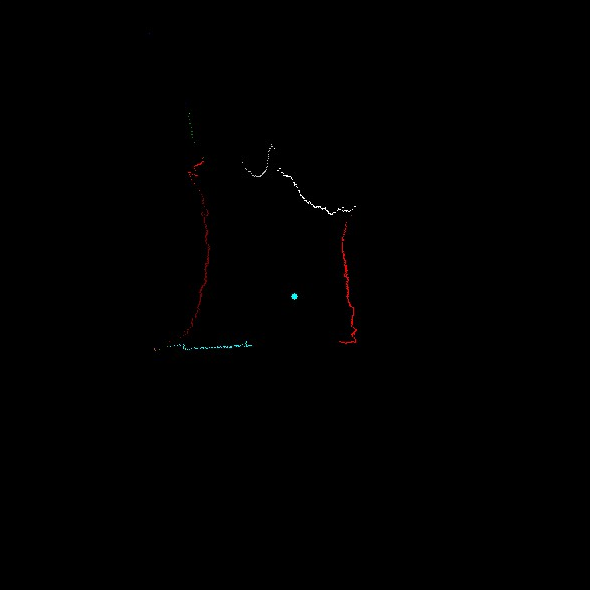
激光雷达学习笔记(二)数据读取和显示
我使用的激光雷达都是日本产北阳电机公司Hokuyo的产品,URG04LX和UTM-30LX。UTM-30LX的价格贵一些,10买的时候大概3W,现在taobao价貌似已经涨到5W了,当然URG04LX也涨价了,09年买的时候是1W,只是不知道现在涨…

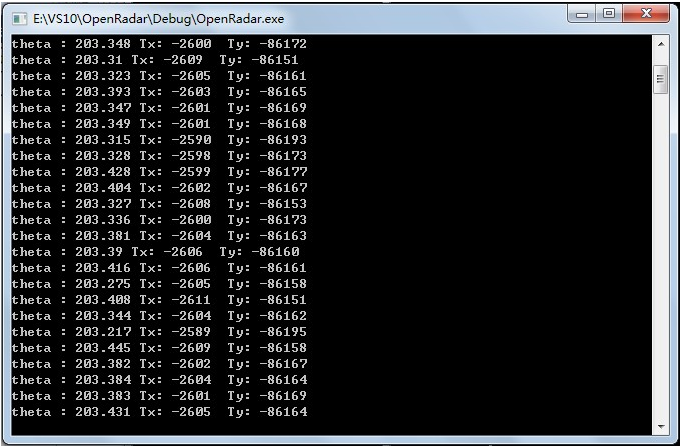
激光雷达学习笔记(一)数据采集
简述: 激光雷达或者叫激光测距仪数据采集,这里介绍激光雷达的型号:UTM-30LX。 1、激光雷达数据采集 当前激光雷达开发环境主流的还是C/C,官方提供的例程也都是C/C的。 官网资料:http://www.hokuyo-aut.jp/02sensor/07s…

Benewake(北醒) 单点TF系列雷达【通用指令串口助手】使用说明
目录 硬件准备1:连接设备2:串口连接以及读数 常见问题1 连接串口后无数据 硬件准备 1:连接设备
连接『TF系列产品』、『TTL - USB 转接板』和『USB 线』,确保无松动,再将『USB 线』与『电脑』连接。
2:串口连接以及读数
1.打开串口助手,选…
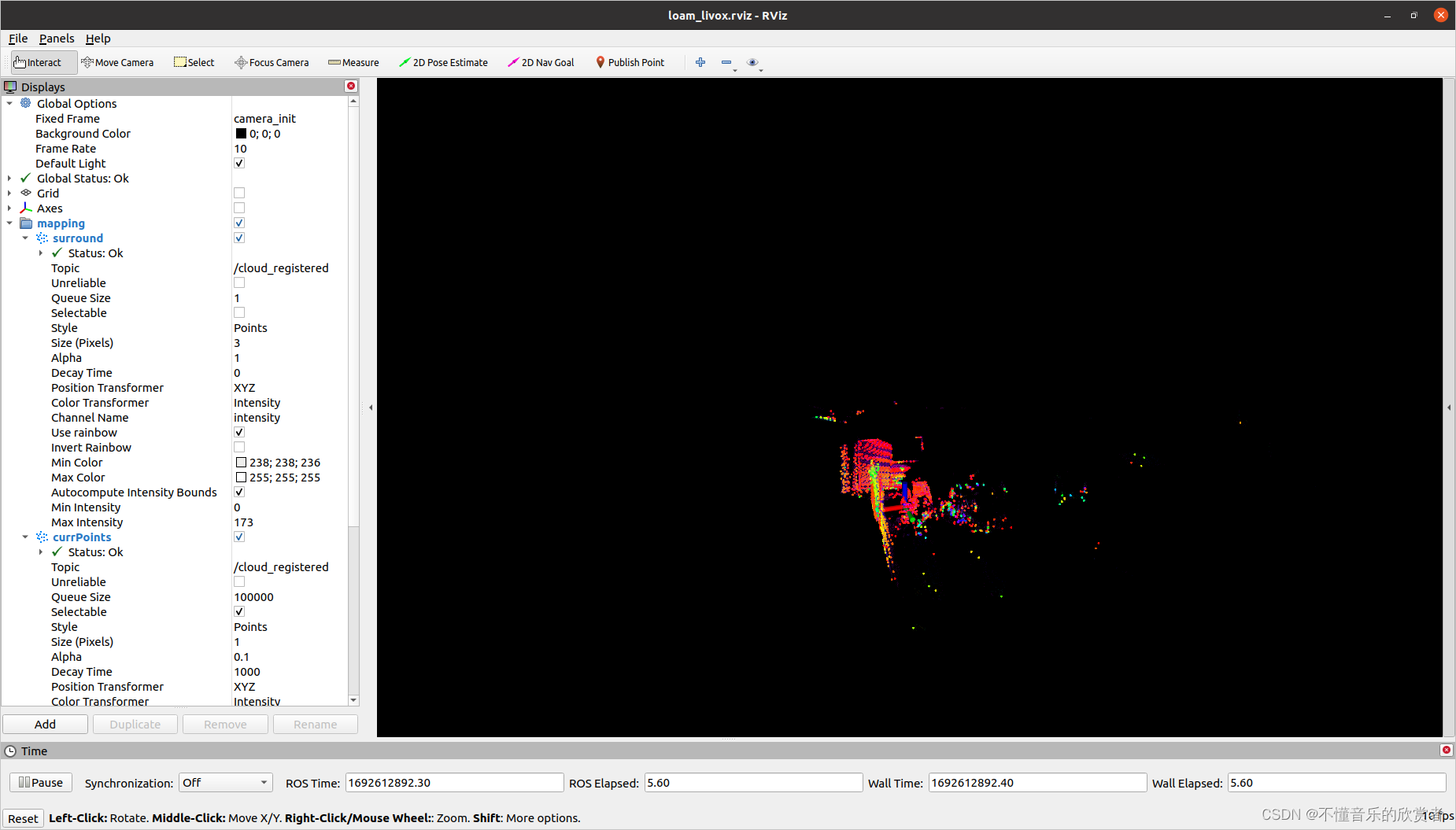
SLAM算法与工程实践——雷达篇:Livox激光雷达使用
SLAM算法与工程实践系列文章
下面是SLAM算法与工程实践系列文章的总链接,本人发表这个系列的文章链接均收录于此
SLAM算法与工程实践系列文章链接 下面是专栏地址:
SLAM算法与工程实践系列专栏 文章目录 SLAM算法与工程实践系列文章SLAM算法与工程实践…

ROS小车研究笔记4/1/2023:研究文章Detecting Glass in Simultaneous Localisation and Mapping
原文出处 article{Wang201797, title “Detecting glass in Simultaneous Localisation and Mapping”, journal “Robotics and Autonomous Systems”, volume “88”, pages “97 - 103”, year “2017”, issn “0921-8890”, doi “http://dx.doi.org/10.1016/j.rob…
【虹科】基于Lidar的体积监控实现高效的库存管理
迄今为止,很多物料厂家测量库存的结果数据仍然不准确,会存在很大的误差,导致供应链效率低下——这个问题可以通过Lidar技术轻松解决。近年来,全球供应链的脆弱性已经多次得到证明。无论是油轮被困在苏伊士运河,阻塞海峡…
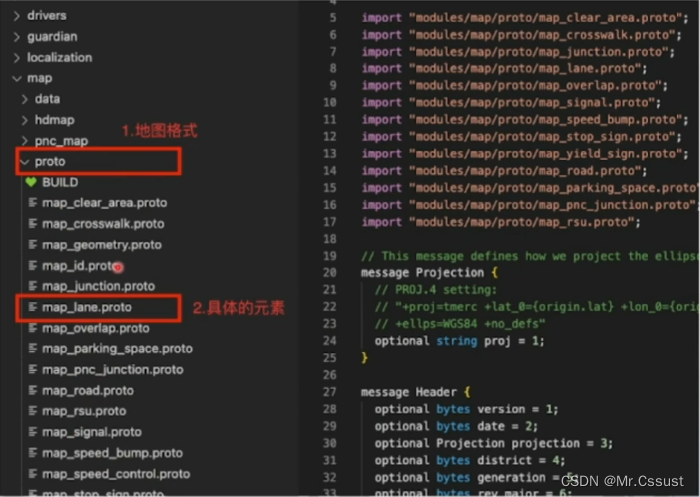
自动驾驶学习笔记(十一)——高精地图
#Apollo开发者#
学习课程的传送门如下,当您也准备学习自动驾驶时,可以和我一同前往: 《自动驾驶新人之旅》免费课程—> 传送门
《Apollo Beta宣讲和线下沙龙》免费报名—>传送门 文章目录
前言
高精地图
地图采集
底图制作
地图…

自动驾驶的纯视觉路线是否靠谱?
(一)文章素材参考
数据参考|汽车ECU开发 微信公众号 (二)正文
1、自动驾驶分级
目前公认的自动驾驶分级标准由SAE(SAE International,Society of Automotive Engineers国际自动机工程师学会&…
Python编程ROS机器人
机器人操作系统 (ROS) 是研究和工业中最受欢迎的机器人软件框架之一。它具有多种功能,可以在机器人中实现不同的功能,而无需从头开始实现。
首先向您展示 ROS 的基础知识,以便您了解差分机器人的基础知识。 然后,您将了解机器人建…
机器学习笔记 - 3D对象检测技术路线调研(未完)
一、3D对象检测简述 3D对象检测是计算机视觉中的一项任务,其目标是根据对象的形状、位置和方向在 3D 环境中识别和定位对象。它涉及检测物体的存在并实时确定它们在 3D 空间中的位置。这项任务对于自动驾驶汽车、机器人和增强现实等应用至关重要。
1、基本流程 给定…
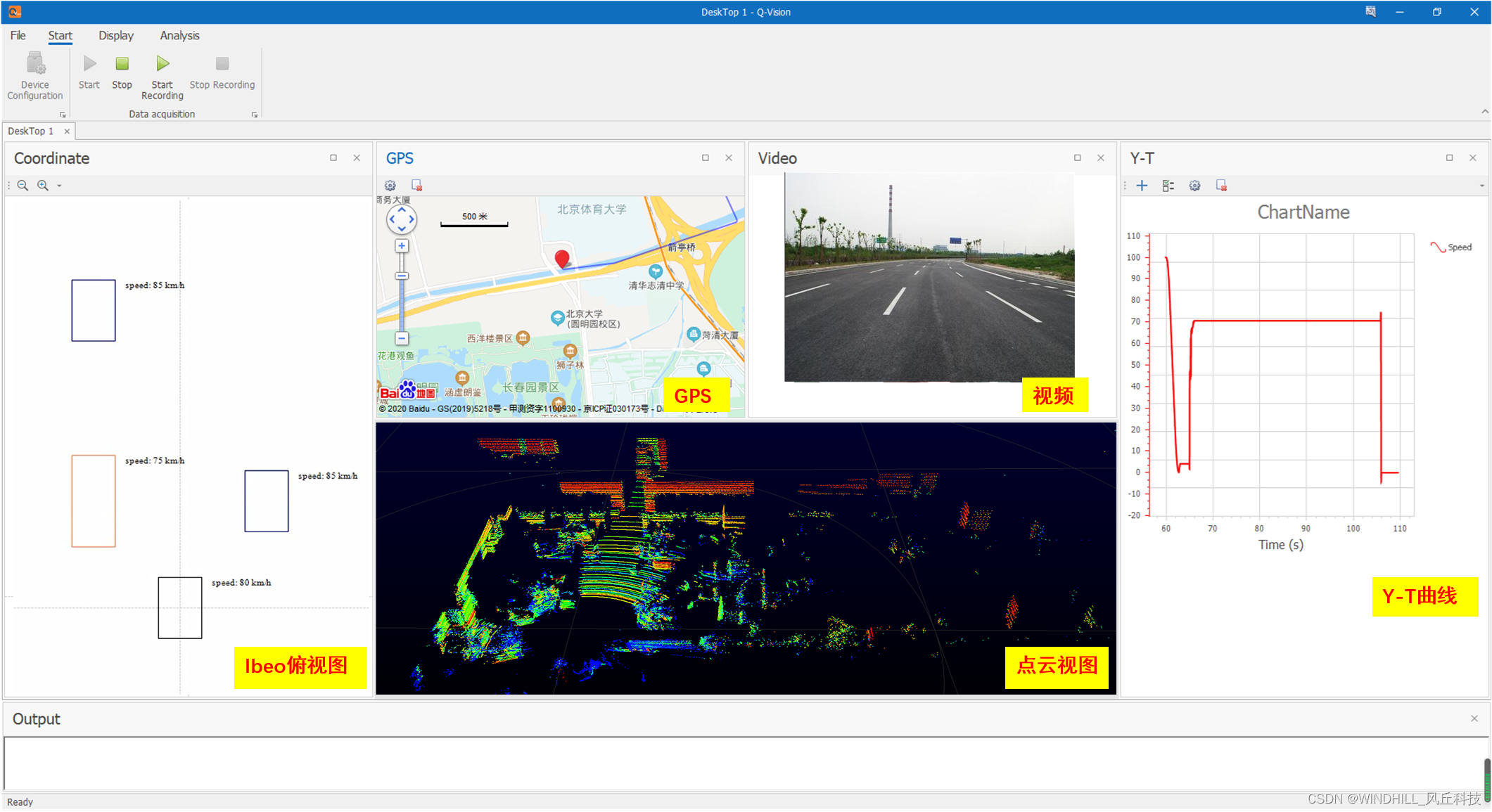
激光雷达在ADAS测试中的应用与方案
在科技高速发展的今天,汽车智能化已是必然的趋势,且自动驾驶汽车的研究也在世界范围内进行得如火如荼。而在ADAS测试与开发中,激光雷达以其高性能和高精度占据着非常重要的地位,它是ADAS测试与开发中不可缺少的组成。 一 激光雷达…
科力雷达Lidar使用指南
科力2D Lidar使用指南
作者: Herman Ye Galbot Auromix 版本: V1.0 测试环境: Ubuntu20.04(x86) PC 以及 Ubuntu20.04(Arm) Nvidia Orin 更新日期: 2023/11/11 注1: 本文内容中的硬件由 Galbot 提供支持。 注2&#x…

自动驾驶 | 激光雷达传感器的核心——MEMS技术
“基于MEMS技术的激光雷达传感器价格较低,但其性能不足以用于自动驾驶车辆。”我们经常听到这样的说法。本文将解释我们的传感器如何使这一说法失效,我们如何为激光雷达开发MEMS技术,如何为激光雷达找到理想的镜面尺寸并说明其决定因素。 汽车…

点云数据从入到arcgis平台、发布场景服务到前端调用
激光雷达是以发射激光束探测目标的位置、速度等特征量的雷达系统。从工作原理上讲,与微波雷达没有根本的区别:向目标发射探测信号(激光束),然后将接收到的从目标反射回来的信号(目标回波)与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、…
ubuntu18.04 RTX3060 rangnet++训练
代码链接: https://github.com/PRBonn/lidar-bonnetal 安装anaconda环境为 CUDA 11.0(11.1也可以)
anaconda环境如下
numpy1.17.2
torchvision0.2.2
matplotlib2.2.3
tensorflow1.13.1
scipy0.19.1
pytorch1.7.1
vispy0.5.3
opencv_python…

大势智慧荣获2023光合组织解决方案大赛人工智能赛道标杆奖及争先奖!
近日,2023年第三届光合组织解决方案大赛获奖名单正式公布。大势智慧以基于国产化平台的实景三维全流程解决方案,突破层层选拔,最终荣获“集智计划”(人工智能赛道)标杆奖及争先奖。
实景三维是我国的数字基础设施&…
livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形
livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形 livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形livox 介绍更换仿真中mid360雷达外形 livox 半固体激光雷达 gazebo 仿真 | 更换仿真中mid360雷达外形
livox 介绍
览沃科技有限公司(L…
大势浏览器DasViewer里面的查询和选择功能,如何实现与矢量数据关联?
答:矢量数据目前得是大势这边软件生产的才可以进行关联。
DasViewer是由大势智慧自主研发的免费的实景三维模型浏览器,采用多细节层次模型逐步自适应加载技术,让用户在极低的电脑配置下,也能流畅的加载较大规模实景三维模型,提供方便快捷的数据浏览操作。

高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据)
高精度端到端在线校准环视相机和LIDAR(精度0.2度内!无需训练数据) 附赠自动驾驶学习资料和量产经验:链接
写在前面
在自动驾驶车辆的使用寿命内,传感器外参校准会因振动、温度和碰撞等环境因素而发生变化。即使是看似…

基于激光雷达点云(lidar)的目标检测方法之BEV
基于激光雷达点云(lidar)的目标检测方法之BEV 附赠自动驾驶学习资料和量产经验:链接
基于lidar的目标检测方法可以分成3个部分:lidar representation,network backbone,detection head,如下图所…
【KITTI】KITTI数据集简介(一) — 激光雷达数据
KITTI数据集的详细介绍网络上已经有较多资料,这里就不详细介绍。这里主要介绍接下来三维点云深度学习模型可能用到的数据文件。
1 KITTI 激光雷达数据存储结构 KITTI数据集包含多个文件夹,这里将介绍激光雷达数据,即data_object_velodyne。其…
Velodyne 32C Win端和Ubuntu18下使用
Win
https://blog.csdn.net/i_robots/article/details/109864454
Ubuntu 激光雷达用以太网连接电脑; 设置ipv4: IP地址:192.168.1.x(x可以为1到254除开201以外的所有值,因为201是激光雷达的IP),我设的192.168.1.70 …
Ubuntu 20.04使用Livox mid 360 测试 FAST_LIO
前言
Livox mid360需要使用Livox-SDK2,而非Livox-SDK,以及对应的livox_ros_driver2 。并需要修改FAST_LIO中部分代码。
1. 安装Livox-SDK2
参考官方教程。 1.1. 安装CMake
sudo apt install cmake1.2. 安装编译Livox-SDK2
git clone https://github…
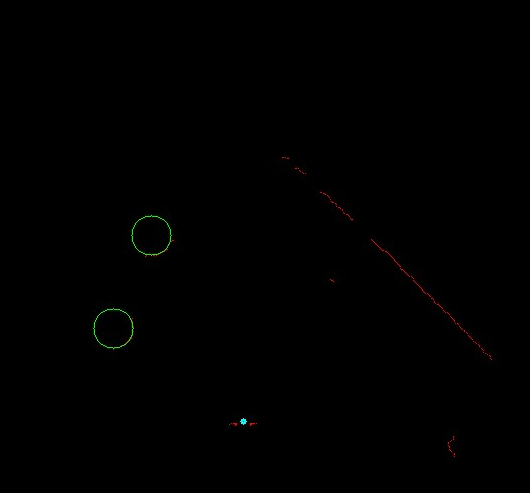
激光雷达学习笔记(五)圆弧
除了直线,在激光雷达获取的数据中,最重要的就是圆弧了,圆弧的位置确定本生没有直线的精度高, 因此不适合用作定位的基准,但是机器人在执行动作时,需要确定圆弧的位置,或则根据圆弧确定目标是 什…

LMS激光传感器的TCP/IP协议问题
今天调试程序发现的一个问题。 LMS传感器与上位机为航插M12的网口连接,所用协议为TCP/IP协议,从而搭建成局域网,因此上位机的IP地址和LMS的前三位必须为一致的。 LMS的地址默认为192.168.0.1:2112。官方提供的sopas软件可以改LMS的…

Benewake(北醒) 快速实现TFLuna-IIC与电脑通信的操作说明
目录 1. 概述2. 测试准备2.1 工具准备 3. IIC通讯测试3.1 引脚说明3.2 测试步骤3.2.1 TFLuna-IIC 与 PC 建立连接3.2.2 获取测距值3.2.3 更改 slave 地址 1. 概述
通过本文档的概述,能够让初次使用测试者快速了解测试 IIC 通信协议需要的工具以及查看哪些对应的 II…
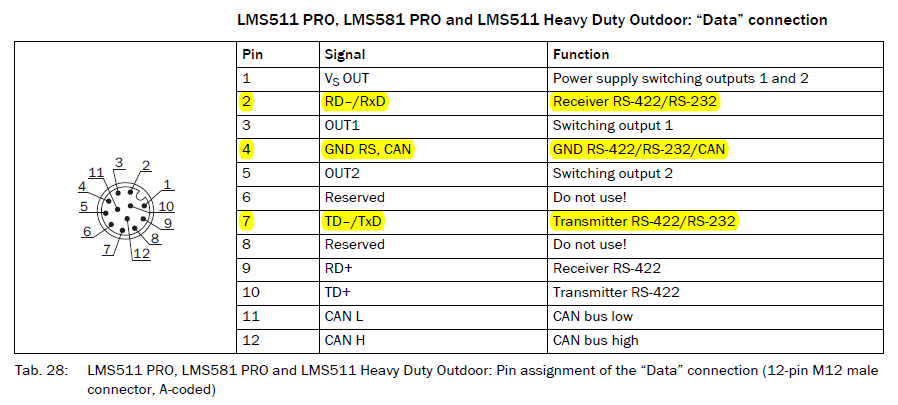
SICK激光雷达LMS511笔记一
一、设备介绍
激光雷达型号:SICK LMS511-10100S01 (DC 24V) 电脑操作系统:Windows10 64位 接线:淘宝买的航空插头(带线),主要接两根线:Ethernet和Power(也可以拧开显示面板旁边的黑色旋钮盖&…
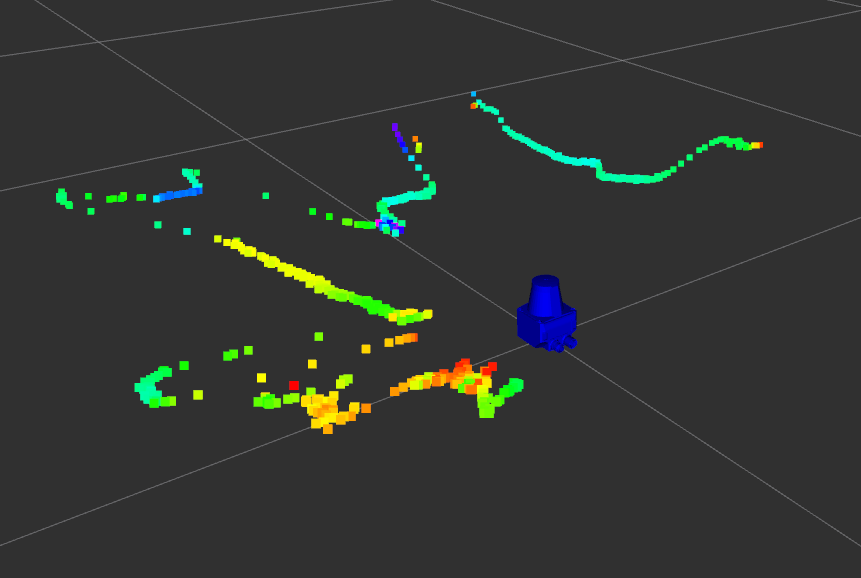
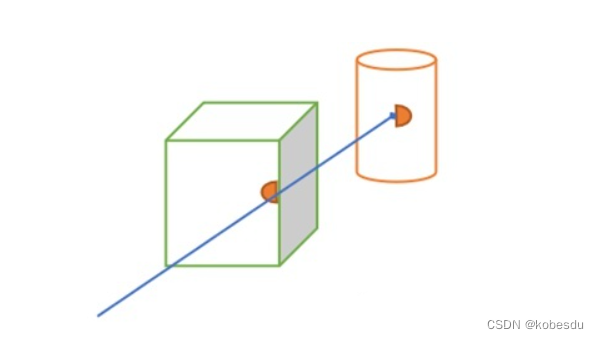
Lidar工作原理以及相关术语
激光雷达是一种常用于感知周围环境的传感器,特别是在自动驾驶和机器人领域。激光雷达使用激光束来测量周围环境的距离和形状,从而创建环境的三维地图。以下是激光雷达的一般工作原理: 激光发射: 激光雷达使用激光器发射激光束。这个激光束是一个窄而集中的光束,通常是红外…
【Lidar】Cloud Compare介绍安装包
CloudCompare是一款基于GPL开源协议的3D点云处理软件,最初被设计用来对稠密的三维点云进行直接比较。它依赖于一种特定的八叉树结构,在进行点云对比这类任务时具有出色的性能。在2005年后,CloudCompare实现了点云和三角形网格之间的比较。 Cl…

在自动驾驶中,单线激光雷达能干什么?
导语:本文内容来自宁波傲视智绘光电科技有限公司创始人、董事长朱少岚在硬创公开课的分享,由雷锋网旗下栏目“新智驾”整理。编者按:本文内容来自宁波傲视智绘光电科技有限公司创始人、董事长朱少岚在硬创公开课的分享,由雷锋网(公…
镭神智能C16的ROS1驱动的安装方法
github 代码链接
git clone -b C16_V4.0 https://github.com/Lslidar/Lslidar_ROS1_driver.gitroslaunch lslidar_driver lslidar_c16.launch
#每周一篇论文2#[感知] 激光雷达外参数自标定
目录激光雷达外参数自标定点云滤波设置ROI地平面分割计算变换矩阵系统评价参数输出最优输出校准效果资源下载激光雷达外参数自标定
基于激光雷达的车载三维重建系统和感知系统工作时需要对激光雷达的外参数(三个旋转参数和三个平移参数)进行标定。 激光雷达的外参数的标定是指…
MDC300上激光雷达的接入
目录使用激光雷达抽象使用华为原生激光雷达抽象注意事项模拟激光雷达抽象采用透传模式注意事项启动方法使用透传模式:使用传感器数据抽象模式:MDC300上接入激光雷达大致分为两种:使用激光雷达抽象 使用华为原生激光雷达抽象(支持禾…
计算机视觉 硬核带你了解9种激光雷达系统
一、扫描方式分类的激光雷达 机械扫描(旋转)、固态(固定)、闪光,其实还有,不过这三种是最主要的。 激光雷达技术使用光来测量世界并生成点云。激光雷达通常具有一个发射器(用于发送光波)和一个接收器(用于接收反射光波)。
1、机械旋转扫描 但是如何获得 360 点云呢?…
大疆Mid360雷达使用教程总结
大疆Mid360雷达使用教程总结
Reference:
https://github.com/Livox-SDK/livox_ros_driver2
1. 下载编译安装Livox-SDK2
Reference:
https://github.com/Livox-SDK/Livox-SDK2/blob/master/README.md
下载编译安装Livox-SDK2:
git clone https://github.com/L…